




服務熱線
0769-28680919
153-2293-3971

影響機器視覺系統的不穩定因素主要有:機械結構定位影響、環境因素影響、軟件穩定性、工業相機對成像穩定性的影響、光源對成像穩定性的影響

1)硬件選擇與設計
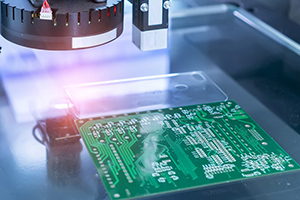
機器視覺成像系統的硬件選擇尤為重要,通過以上對CCD相機與CMOS相機的分析可知,如果沒有特殊的要求,比如攝像速度較高(CMOS具有更快的讀出速度),CCD傳感器相機是保證圖像質量和穩定性的首要選擇,其中相機的分辨率和幀率主要根據檢測精度和檢測速度來選擇,通過計算檢測物體的視場大小與相機與被測物之間的距離決定合適的分辨率,考慮被測物體的運動速度與檢測精度要求選擇相機的幀率。
對于鏡頭,主要需要根據相機的極限分辨率來選取對應的鏡頭分辨率,選擇大于相機極限分辨率的相機即可,還需要根據工作距離與視野計算鏡頭的焦距,并根據被測物體與相機的距離變化選用合適的景深。在高精度測量下,要保證測量精度,除以上參數的正確選擇之外,可以選擇幾何畸變相對于普通鏡頭小的遠心鏡頭,遠心鏡頭不僅幾何畸變較小,還能減小物體距離變化帶來的誤差。
如無特殊要求而采用X射線等不可見光光源,對于可見光光源,應優先考慮使用LED光源,在對采集圖像質量有決定性影響的光源均勻性上,LED光源明顯優于鹵素燈、日光燈等其它光源,而且它還具有耗電低、使用壽命長和對環境無污染的優點。同時,為了減小外界光對視覺系統穩定性的影響,可以通過增加光源箱的方式屏蔽外界光源。
2)軟件設計
標定
相機與鏡頭由于工藝的原因,總會或多或少地導致獲取的原始圖像存在幾何畸變誤差,這種誤差不能通過硬件的優化消除,但可以利用標定軟件算法來減弱這種誤差對測量精度的影響,相機標定的基本原理是通過相機對視場內不同角度標準圖像(通常使用標定板)的拍攝來求出相機的內、外參數以及畸變參數,建立三維坐標與圖像坐標的映射關系,從而對得到的原始畸變圖像進行矯正,通常相機標定在有精度要求的測量和定位中必須使用。
圖像處理
硬件采集到的原始圖像最終要通過圖濾波、邊緣檢測等算法才能完成檢測功能,實現檢測結果的輸出。其中圖像濾波可以抑制采集到圖像中存在的噪聲,降低光源與灰度值不穩定的問題,提高信噪比,其本質是通過算法保證圖像上像素點間最小方差最小。對于高精度測量系統來說,粗邊界像素級精度往往難以滿足要求,亞像素級邊緣定位技術在像素級別位置通過細分算法與擬合方法結合可以使邊緣位置達到0.1甚至0.01的亞像素級精度,系統檢測精度得到保證。
總結總的來說,機器視覺系統的設計需要考慮多方面的因素,除了根據需求按照常規選型參數選擇相應參數的設備之外,還需要考慮光源的穩定性、相機的畸變誤差,以及被檢測物體與相機之間的相對運動等因素給機器視覺系統帶來的穩定性干擾與測量誤差。只有綜合考慮這些因素進行視覺系統的優化設計,才能建立穩定、合格的機器視覺系統。
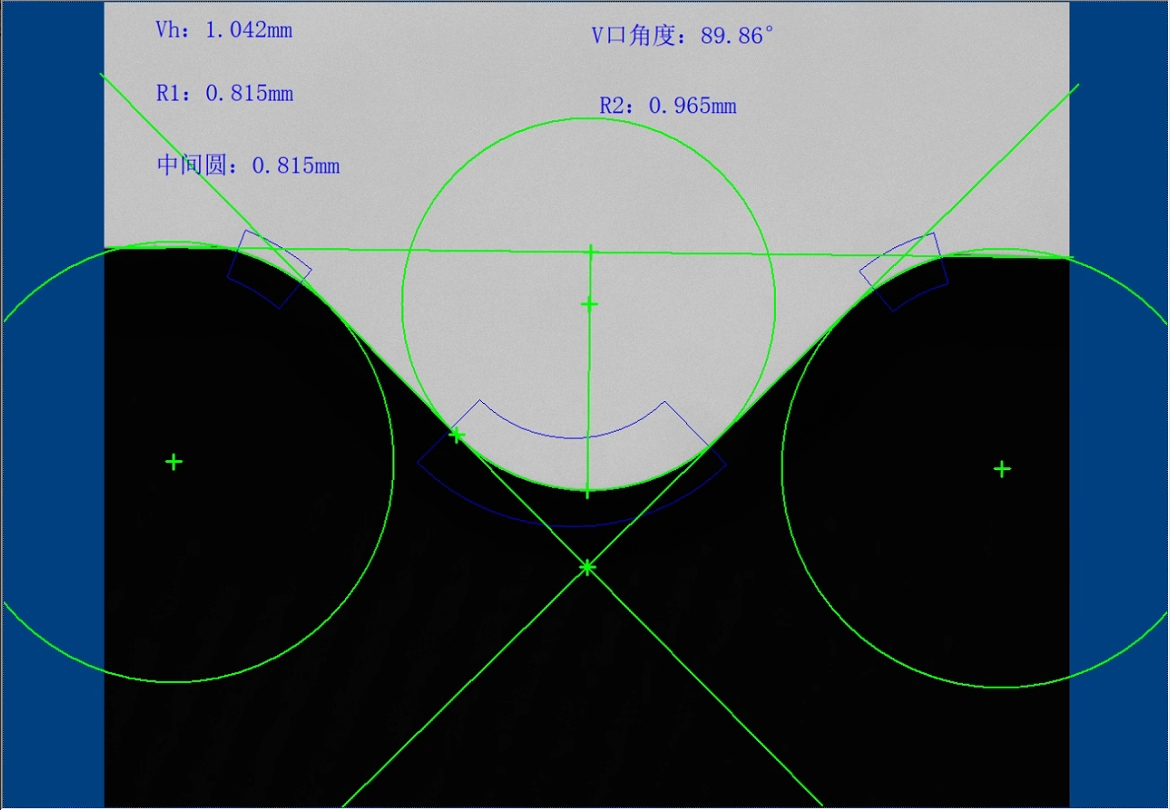 康耐德智能晶圓NOTCH槽口輪廓視覺檢測
2025-04-26
康耐德智能晶圓NOTCH槽口輪廓視覺檢測
2025-04-26
晶圓NOTCH輪廓檢測是半導體制造中重要的檢測環節,主要測量晶圓邊緣、槽口(notch)的形狀和尺寸,確保晶圓的質量和工藝精度。
 康耐德LED灌膠位置視覺檢測系統
2025-04-26
康耐德LED灌膠位置視覺檢測系統
2025-04-26
在LED制造領域,灌膠工藝是確保產品性能與穩定性的關鍵環節
 康耐德機器視覺系統軟件的具體功能都有那些?
2025-04-19
康耐德機器視覺系統軟件的具體功能都有那些?
2025-04-19
康耐德機器視覺系統的具體功能可以根據不同的應用場景和需求進行定制和優化。
 康耐德機器視覺AOI檢測系統:OCR字符識別與在線檢測一體化
2025-04-13
康耐德機器視覺AOI檢測系統:OCR字符識別與在線檢測一體化
2025-04-13
康耐德機器視覺AOI檢測系統的OCR字符識別功能具有以下特點和優勢
 官方公眾號
官方公眾號 官方抖音號
官方抖音號Copyright ? 2022 東莞康耐德智能控制有限公司版權所有.機器視覺系統 粵ICP備2022020204號-1 聯系我們 | 網站地圖
