




服務(wù)熱線
0769-28680919
153-2293-3971

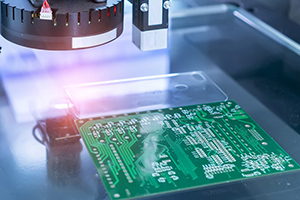
3D相機在檢測精密元器件時面臨的挑戰(zhàn)主要包括:
環(huán)境光照影響:在室外或強光環(huán)境下使用3D相機時,環(huán)境光照可能大大超過相機自身的光源強度,導(dǎo)致成像結(jié)果出現(xiàn)錯誤或缺失。這對于精密元器件的準(zhǔn)確檢測是一個挑戰(zhàn),因為需要在各種光照條件下保持穩(wěn)定性和準(zhǔn)確性。
散射介質(zhì)的影響:散射介質(zhì)如霧、雨等會導(dǎo)致多條光路的出現(xiàn),影響對距離的判斷,這對于3D相機在精密元器件檢測中的準(zhǔn)確性和可靠性構(gòu)成挑戰(zhàn)。
高反光表面:精密元器件可能具有高反光表面,這會影響3D相機的成像效果,使得在復(fù)雜的光亮表面上難以確保高精度檢測的效果。
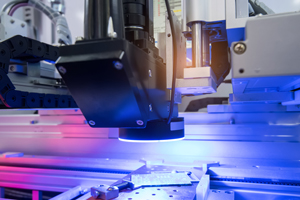
產(chǎn)品種類多,視野多樣:精密元器件種類繁多,視野需求多樣,這對3D相機的適應(yīng)性和靈活性提出了挑戰(zhàn),需要3D相機產(chǎn)品線豐富,能夠滿足不同視野和特殊工況的需求。
檢測速度要求高:在生產(chǎn)線上,對精密元器件的檢測速度要求很高,需要3D相機能夠快速捕捉和處理數(shù)據(jù),以滿足高速生產(chǎn)的需求。
精度要求高:精密元器件的檢測對精度要求極高,3D相機需要提供高精度的測量,以確保檢測結(jié)果的準(zhǔn)確性。
成本問題:相比傳統(tǒng)二維視覺檢測技術(shù),3D相機的成本較高,這限制了其在某些領(lǐng)域的推廣和應(yīng)用。
技術(shù)復(fù)雜性:3D相機技術(shù)需要更多的硬件和算法支持,涉及的知識和技術(shù)比較復(fù)雜,對操作和維護人員的要求較高。
魯棒性問題:基于學(xué)習(xí)的3D目標(biāo)檢測方法容易受到攻擊,比如給傳感器輸入中添加一些噪聲或目標(biāo),就可能造成3D目標(biāo)檢測器失效,造成漏檢。
這些挑戰(zhàn)需要通過技術(shù)創(chuàng)新和算法優(yōu)化來克服,以確保3D相機在精密元器件檢測中的有效性和可靠性。
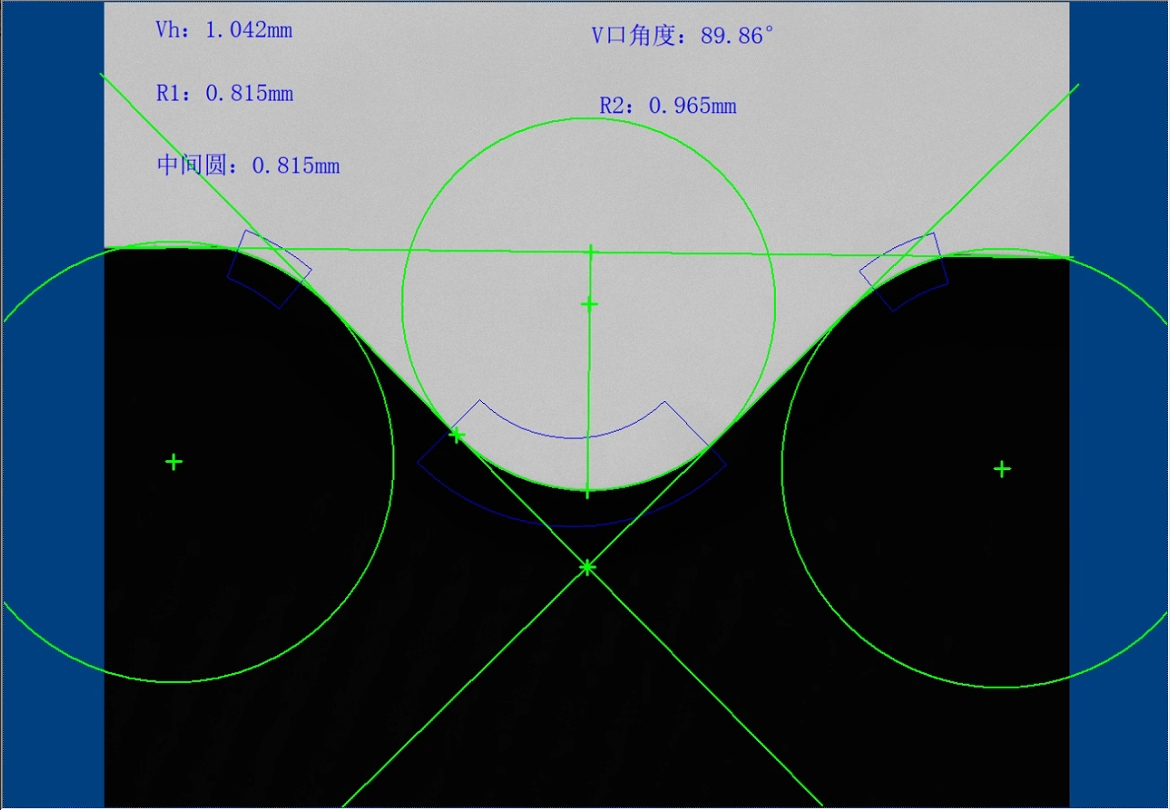 康耐德智能晶圓NOTCH槽口輪廓視覺檢測
2025-04-26
康耐德智能晶圓NOTCH槽口輪廓視覺檢測
2025-04-26
晶圓NOTCH輪廓檢測是半導(dǎo)體制造中重要的檢測環(huán)節(jié),主要測量晶圓邊緣、槽口(notch)的形狀和尺寸,確保晶圓的質(zhì)量和工藝精度。
 康耐德LED灌膠位置視覺檢測系統(tǒng)
2025-04-26
康耐德LED灌膠位置視覺檢測系統(tǒng)
2025-04-26
在LED制造領(lǐng)域,灌膠工藝是確保產(chǎn)品性能與穩(wěn)定性的關(guān)鍵環(huán)節(jié)
 康耐德機器視覺系統(tǒng)軟件的具體功能都有那些?
2025-04-19
康耐德機器視覺系統(tǒng)軟件的具體功能都有那些?
2025-04-19
康耐德機器視覺系統(tǒng)的具體功能可以根據(jù)不同的應(yīng)用場景和需求進行定制和優(yōu)化。
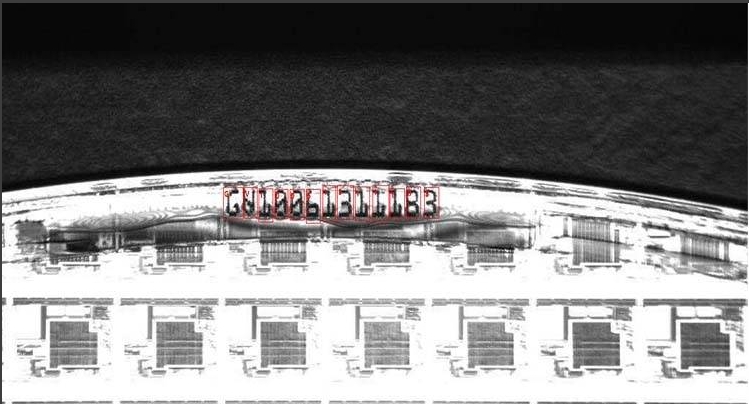 康耐德機器視覺AOI檢測系統(tǒng):OCR字符識別與在線檢測一體化
2025-04-13
康耐德機器視覺AOI檢測系統(tǒng):OCR字符識別與在線檢測一體化
2025-04-13
康耐德機器視覺AOI檢測系統(tǒng)的OCR字符識別功能具有以下特點和優(yōu)勢
 官方公眾號
官方公眾號 官方抖音號
官方抖音號Copyright ? 2022 東莞康耐德智能控制有限公司版權(quán)所有.機器視覺系統(tǒng) 粵ICP備2022020204號-1 聯(lián)系我們 | 網(wǎng)站地圖
